近日,李世华教授团队(MSCL)在智能机器人与系统国际会议IROS2025(IEEE/RSJ International Conference on Intelligent Robots and Systems)投稿的4篇论文全部被录用,其中1篇为IEEE RAL 期刊转投。涵盖了机械臂主动安全避障运动控制、无人机视觉伺服自主巡检飞行、MPPI无人机抗干扰飞行控制、物理先验NODE时序建模等前沿方向。这些研究成果推动了智能机器人精细建模、智能抗干扰与安全控制的理论与应用的同步发展,并为移动机器人、无人机与机械臂系统的智能高效与安全发展提供了技术支撑。
该系列论文第一作者均为自动化学院在读博士研究生,工作得到了国家自然科学基金、南京市重大科技专项等项目的资助。
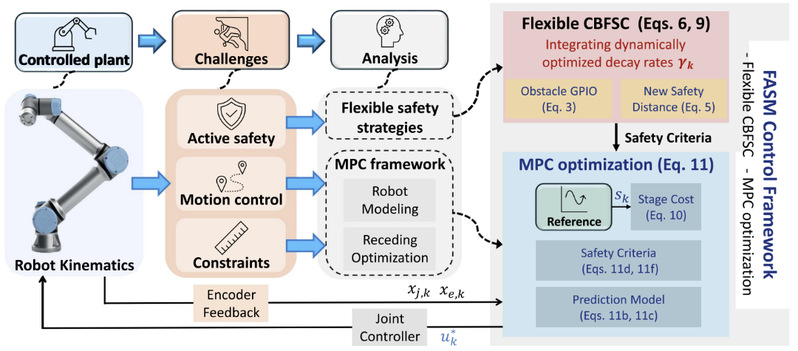
1. 题目:Flexible Active Safety Motion Control for Robotic Obstacle Avoidance: A CBF-Guided MPC Approach, IEEE RAL with IROS presentation,作者:刘金浩,杨俊*,冒建亮,朱天启,谢启航,李一萌,王翔宇,李世华。
2. 题目:DR-MPC: Disturbance-Resilient Model Predictive Visual Servoing Control for Quadrotor UAV Pipeline Inspection,作者:李雯,苏金亚*,刘存佳,陈文华,李世华。
3. 题目:DA-MPPI: Disturbance-Aware Model Predictive Path Integral via active disturbance estimation and compensation,作者:张皓迪,苏金亚*,杨俊,李世华。
4. 题目:Pet-NODE: Embedding Priors and Time-series Features into Neural ODE,作者:陈嘉,许永跃,苏金亚*,顾坤,王富有,李世华。
IROS是中国自动化学会A类会议,是机器人领域最具权威性和影响力的国际盛会之一。机电系统控制实验室(Mechatronic Systems Control Laboratory, MSCL)由李世华教授领导(自动化学院院长,国家级人才、IEEE/IET/CAA/AAIA Fellow),实验室主页:http://www.seumscl.com/。论文主要通讯作者:苏金亚教授,国家级青年人才、东南大学青年首席教授,研究方向:AI在环安全具身智能,主页:/sjy2/list.htm。

